锋云智控全身关节操控使用指南完整功能说明:状态控制 / 动作执行 / 数据编辑 / 零力矩配置 / 自动添加 / 常用动作 / 音频管理 / 数据导入导出
本指南详细介绍全身关节操控系统的所有功能:机器人状态监控与停止控制、动作选择与执行、动作数据编辑(包含29个关节:12个腿部、3个腰部、14个手臂)、零力矩配置(关节锁定/解锁)、自动添加动作(10分钟倒计时)、常用动作管理(执行与替换)、动作名修改与音频上传、数据导入导出等。
1. 机器人状态与停止控制
1.1 状态显示与刷新
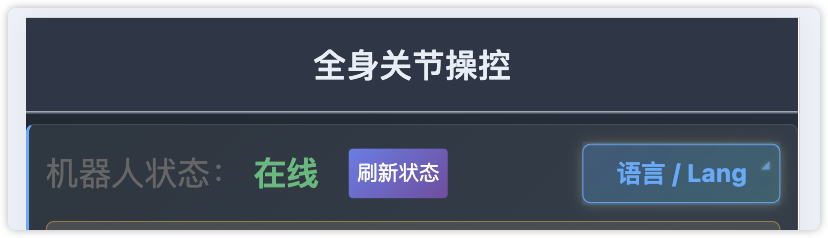
- 查看状态:页面顶部显示机器人当前状态,
在线 (Online)表示连接正常,离线 (Offline)表示连接异常。 - 刷新状态:点击"刷新状态"按钮,系统会重新检测机器人连接状态。如果状态为离线,请检查网络连接和机器人IP地址。
- 语言切换:右上角语言下拉菜单支持中文和英文切换,切换后界面文字会实时更新。
1.2 停止控制
- 紧急停止:点击红色的 停止 按钮,可以立即停止机器人当前执行的所有动作。
- 使用场景:当机器人动作异常、需要紧急停止或准备执行新动作前,使用停止功能确保安全。
- 注意事项:停止按钮仅在机器人
在线 (Online)状态下可用。
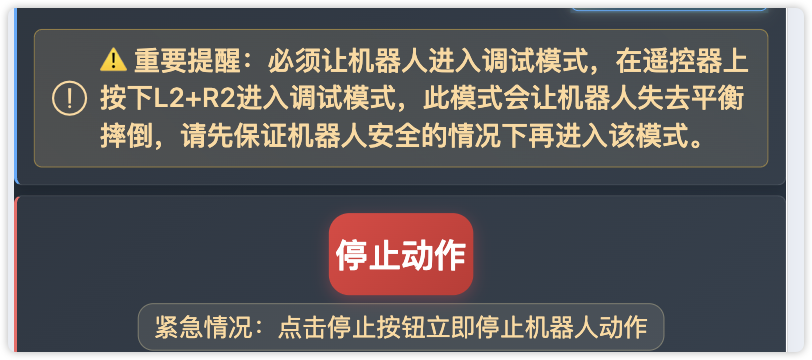
调试模式提醒:页面会显示调试模式提示,提醒用户当前处于调试状态,操作时需谨慎。
紧急情况下,优先使用停止按钮中断机器人动作,确保人员和设备安全。
2. 选择与执行动作
2.1 搜索与选择动作
- 搜索动作:在"选择动作"区域的搜索框中输入关键字,系统会实时过滤显示匹配的动作名称。
- 选择动作:点击下拉菜单,从动作列表中选择目标动作。搜索时会显示匹配结果数量。
- 清空搜索:点击搜索框右侧的清除按钮,可以清空搜索关键词,恢复显示所有动作。
2.2 执行动作
- 执行条件:确保机器人状态为
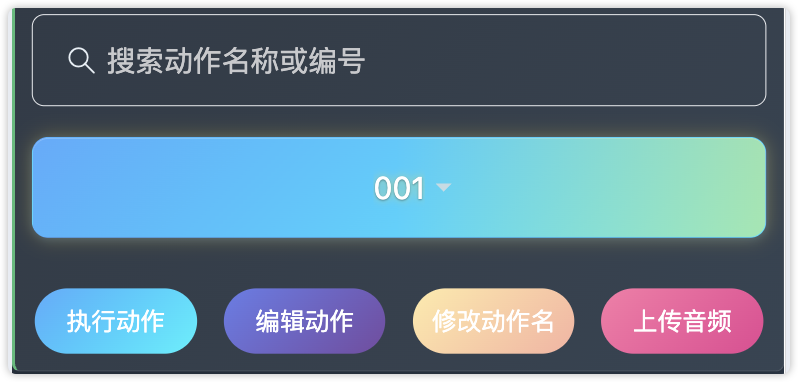
在线 (Online),已选择动作,且当前没有正在执行的动作。 - 执行操作:点击 执行动作 按钮,系统会发送动作执行命令。
- 执行状态:执行过程中按钮会显示 loading 状态,防止重复点击。执行完成后会有成功或失败提示。
- 观察效果:执行完成后观察机器人动作是否符合预期,如有问题可停止后重新执行或编辑动作数据。
执行按钮不可点击的常见原因:未选择动作、机器人离线、正在执行其他动作。请检查这些条件后再执行。
3. 编辑动作数据
3.1 打开编辑弹窗
- 选择动作:先在下拉菜单中选择要编辑的动作。
- 打开编辑:点击 编辑动作 按钮,系统会加载该动作的数据并打开编辑弹窗。
- 数据加载:编辑弹窗打开后会显示该动作的所有帧数据,每帧包含29个关节角度值(12个腿部关节、3个腰部关节、14个手臂关节)。

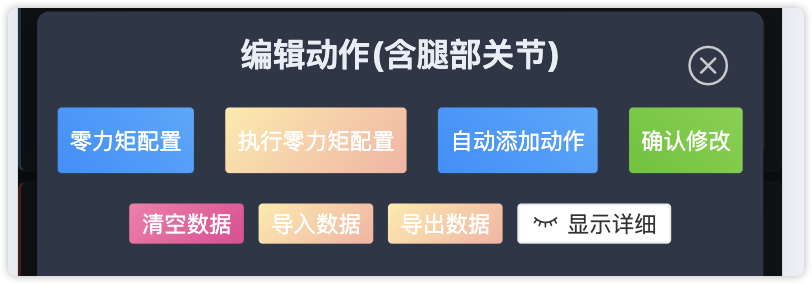
3.2 编辑弹窗功能按钮
编辑弹窗顶部包含多个功能按钮:
- 零力矩配置:配置29个关节的锁定/解锁状态(详见第4节)
- 执行零力矩配置:应用零力矩配置并执行
- 自动添加:自动采集动作帧(详见第5节)
- 确认修改:保存所有编辑的数据
- 批量删除:删除所有动作帧数据
- 导入数据:从CSV文件导入动作数据(详见第8节)
- 导出数据:将当前数据导出为CSV文件(详见第8节)
- 显示/隐藏详情:切换显示所有29列关节数据或仅显示关键列
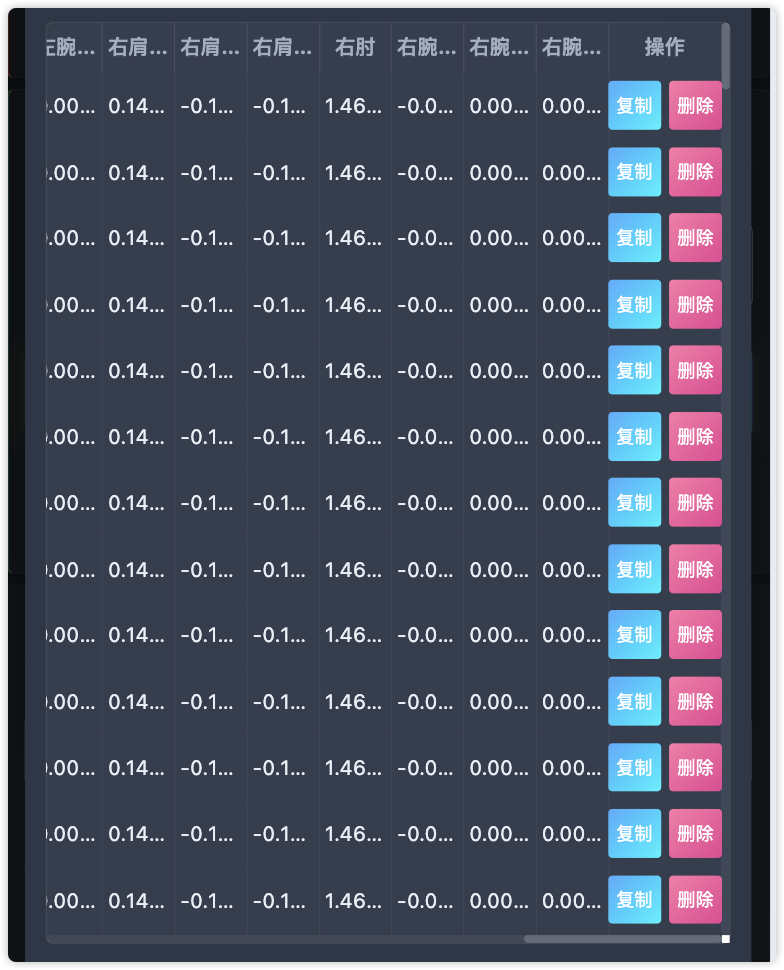
3.3 数据表格说明
编辑弹窗中的数据表格包含以下列:
| 列序号 | 关节名称 | 说明 |
|---|---|---|
| 0-5 | 左腿关节 | 左髋俯仰、左髋横滚、左髋偏航、左膝、左踝俯仰、左踝横滚 |
| 6-11 | 右腿关节 | 右髋俯仰、右髋横滚、右髋偏航、右膝、右踝俯仰、右踝横滚 |
| 12-14 | 腰部关节 | 腰偏航、腰横滚、腰俯仰 |
| 15-21 | 左臂关节 | 左肩俯仰、左肩横滚、左肩偏航、左肘、左腕横滚、左腕俯仰、左腕偏航 |
| 22-28 | 右臂关节 | 右肩俯仰、右肩横滚、右肩偏航、右肘、右腕横滚、右腕俯仰、右腕偏航 |
注意:全身关节操控包含29个关节(腿部12个 + 腰部3个 + 手臂14个),数据为只读显示,需要通过自动添加或导入方式生成。
3.4 行操作功能
- 复制行:点击某行的"复制"按钮,可以选择复制到末尾或复制到当前行隔一行的下方。
- 删除行:点击某行的"删除"按钮,确认后可以删除该动作帧。
3.5 保存修改
- 确认数据:编辑完成后,检查数据是否正确。
- 保存数据:点击 确认修改 按钮,系统会保存所有修改。
- 保存成功:保存成功后会显示提示,编辑弹窗会自动关闭。
保存前请确保数据完整,保存后修改会立即生效。建议在保存前先测试动作效果。
4. 零力矩配置
4.1 打开零力矩配置
- 进入编辑:在编辑动作弹窗中,点击 零力矩配置 按钮。
- 加载配置:系统会从后端读取当前的零力矩配置(kpkd_config),显示29个关节的锁定/解锁状态。
- 配置说明:零力矩配置用于控制哪些关节处于锁定状态(不可活动),哪些关节处于解锁状态(可活动)。锁定状态的关节在执行动作时不能移动,解锁状态的关节可以正常活动。

4.2 关节分组说明
零力矩配置弹窗将29个关节分为三个部分:
- 手臂部分:包含左臂7个关节(序号15-21)和右臂7个关节(序号22-28)
- 腰部部分:包含3个腰部关节(序号12-14)
- 腿部部分:包含左腿6个关节(序号0-5)和右腿6个关节(序号6-11)
4.3 配置关节锁定状态
- 查看状态:每个关节显示当前状态,解锁(绿色)表示该关节可以活动,锁定(红色)表示该关节被锁定,不可活动。
- 切换状态:点击关节卡片,可以在锁定和解锁状态之间切换。锁定状态的关节会显示红色边框和锁定图标。
- 配置建议:
- 如果只想让手臂活动,可以将腿部关节全部锁定,这样腿部关节在执行动作时不会移动
- 如果只想让腿部活动,可以将手臂关节全部锁定,这样手臂关节在执行动作时不会移动
- 如果只想让上半身活动,可以将腿部关节和部分腰部关节锁定,限制下半身的活动范围

4.4 保存与执行配置
- 保存配置:点击 保存配置 按钮,将当前配置保存到系统,但不立即执行。
- 保存并执行:点击 保存并执行 按钮,保存配置后立即应用零力矩设置。
- 执行零力矩配置:在编辑弹窗中点击 执行零力矩配置 按钮,会先停止所有执行,然后应用已保存的零力矩配置。
零力矩配置会影响关节的活动状态。锁定关节后,该关节在执行动作时不会移动,可以用于固定某些部位或限制活动范围。建议根据实际需求合理配置。
执行零力矩配置会先停止机器人当前所有动作,请确保在安全环境下操作。
5. 自动添加动作
5.1 启动自动添加
- 准备工作:
- 确保机器人状态为
在线 (Online) - 已选择要编辑的动作
- 已配置好零力矩设置(确定哪些关节在执行时会被锁定,不可活动)
- 清空当前动作数据(自动添加会清空现有数据)
- 确保机器人状态为
- 打开自动添加:在编辑弹窗中点击 自动添加 按钮。
- 确认操作:系统会提示自动添加将清空当前所有数据,确认后进入自动添加弹窗。

5.2 自动添加操作流程
- 查看信息:自动添加弹窗显示当前动作名称和机器人状态。
- 开始采集:点击 开始自动添加 按钮,系统开始倒计时(10分钟)。
- 摆动作:在倒计时期间,手动摆出想要的动作姿势,系统会持续采集关节角度数据。
- 观察进度:弹窗会显示倒计时时间和进度条,实时显示采集进度。
- 停止采集:
- 手动停止:点击 停止自动添加 按钮
- 自动停止:倒计时结束后自动停止
- 完成采集:停止后弹窗会自动关闭,并重新打开编辑弹窗显示采集到的动作数据。
5.3 操作注意事项
- 倒计时期间:系统会持续采集关节数据,建议缓慢、流畅地摆出动作,避免快速大幅度移动。
- 关节锁定:零力矩配置中锁定的关节在执行动作时不会移动,但采集时仍会记录所有关节的数据。锁定关节主要用于在执行动作时固定某些部位。
- 数据质量:采集的数据质量取决于动作的流畅性和关节的稳定性,建议在平稳环境下操作。
- 无法关闭:倒计时期间弹窗无法关闭,必须等待倒计时结束或手动停止。
自动添加适合快速生成动作骨架,采集完成后可以手动调整数据或使用导入功能导入精确数据。
自动添加过程中请保持机器人稳定,避免剧烈移动或碰撞,确保采集数据的安全性和准确性。
6. 常用动作管理
6.1 常用动作表
- 查看常用动作:页面下方"常用动作"表格显示前10个常用动作(按sort值排序)。
- 表格内容:表格包含序号、动作名称和操作列,操作列包含"执行"和"替换"按钮。
- 快捷执行:在常用动作表中直接点击 执行 按钮,无需在上方下拉菜单再次选择。

6.2 替换常用动作
- 选择替换位置:在常用动作表中,点击要替换动作的 替换 按钮。
- 选择新动作:在弹出的动作选择弹窗中,从其他动作(非前10个)中选择一个动作作为替换。
- 确认替换:系统会显示替换确认弹窗,显示当前动作和要替换的动作,确认后执行替换。
- 替换机制:替换操作会交换两个动作的sort值,从而实现位置互换。


常用动作表会根据sort值自动排序,替换后表格会立即更新显示新的常用动作列表。
7. 动作名与音频管理
7.1 修改动作名
- 选择动作:先在下拉菜单中选择要修改名称的动作。
- 打开修改:点击 修改动作名 按钮。
- 输入新名称:在弹窗中输入新的动作名称(最多20个字符),系统会检查是否与其他动作名重复。
- 确认修改:点击"确定"按钮保存,修改成功后动作列表会立即更新。

动作名称不能为空,不能与其他动作重复,建议使用有意义的名称便于识别和管理。
7.2 上传音频
- 选择动作:先在下拉菜单中选择要绑定音频的动作。
- 打开上传:点击 上传音频 按钮。
- 选择文件:从本地选择音频文件(支持常见音频格式,最大30MB)。
- 上传完成:上传成功后会显示提示,音频文件会与动作绑定。
- 测试播放:执行该动作时,如果绑定了音频,系统会同步播放音频。
- 替换音频:重新点击"上传音频"可以覆盖旧的音频文件。
音频文件建议使用常见格式(如MP3、WAV等),文件大小控制在30MB以内,确保上传和播放的流畅性。
8. 数据导入导出
8.1 导出数据
- 打开编辑:在编辑动作弹窗中,确保有数据可导出。
- 导出操作:点击 导出数据 按钮。
- 文件下载:系统会生成CSV文件并自动下载,文件名格式为"动作名_data.csv"。
- 文件格式:导出的CSV文件第一行为表头(29个关节名称),后续行为动作帧数据(每行29个关节角度值)。
导出数据可以用于备份、分享或使用Excel等工具进行批量编辑,编辑后可以重新导入。
8.2 导入数据
- 准备文件:准备CSV格式的动作数据文件,确保格式正确(第一行为表头,后续行为数据,每行29个关节角度值)。
- 打开导入:在编辑动作弹窗中,点击 导入数据 按钮。
- 选择文件:从本地选择CSV文件,系统会读取并解析文件内容。
- 数据加载:导入成功后会显示提示,编辑弹窗中的数据表格会更新为导入的数据。
- 确认保存:检查导入的数据是否正确,确认后点击"确认修改"保存到系统。
导入数据会替换当前编辑弹窗中的所有数据,请确保导入文件格式正确,建议先备份现有数据。
CSV文件格式要求:第一行可以是表头(会被自动识别并跳过),每行数据包含29个关节角度值,用逗号分隔。